I spent my undergrad working on the unique cyclorotor VTOL concept, building a few to support grad research whenever I could. I've seen a few forum posts and comment sections about the topic with a lot of criticism and misunderstanding, and this vehicle concept has gotten little love outside of 2-3 research labs in the world. I wanted to share my experience with this vehicle configuration to clear up the general speculation surrounding cyclocopters. Maybe even convince you to build your own!
How does it work?
The cyclorotor generates thrust perpendicular to the axis of the shaft unlike a conventional helicopter. It does this by pitching it's blades at 1/rev around the axis of rotation such that the blades always have a positive angle of attack around the rotation. By playing with the geometry of the pitch linkages, you can vector the net thrust vector in any direction you want.
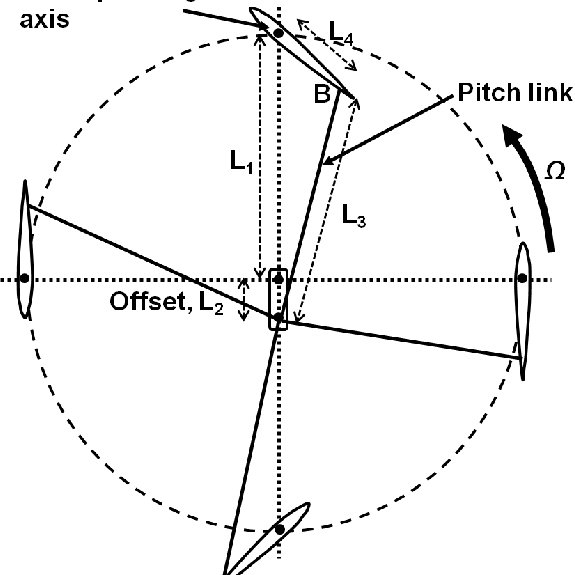 |  |
| A simple mechanical linkage allows for passive actuation of the blades around the rotation, similar to the working principal of a swashplate. | Changing the offset angle changes the location at which maximum thrust is generated around the rotation. You can vector the thrust forward for forward flight and the advancing blade acts like a generic wing. |
For hover, obviously you would want the thrust vector pointing upwards. However, the ability to change the thrust vector gives unique forward flight capabilities. In this video, the flight controller is maintaining 0 degree pitch attitude, and the pitch stick on the transmitter is mapped directly to the phasing (forward/aft thrust vector) of the cyclorotors. This allows for forward flight at level attitude and the ability to fly in high winds:
How do you build one?
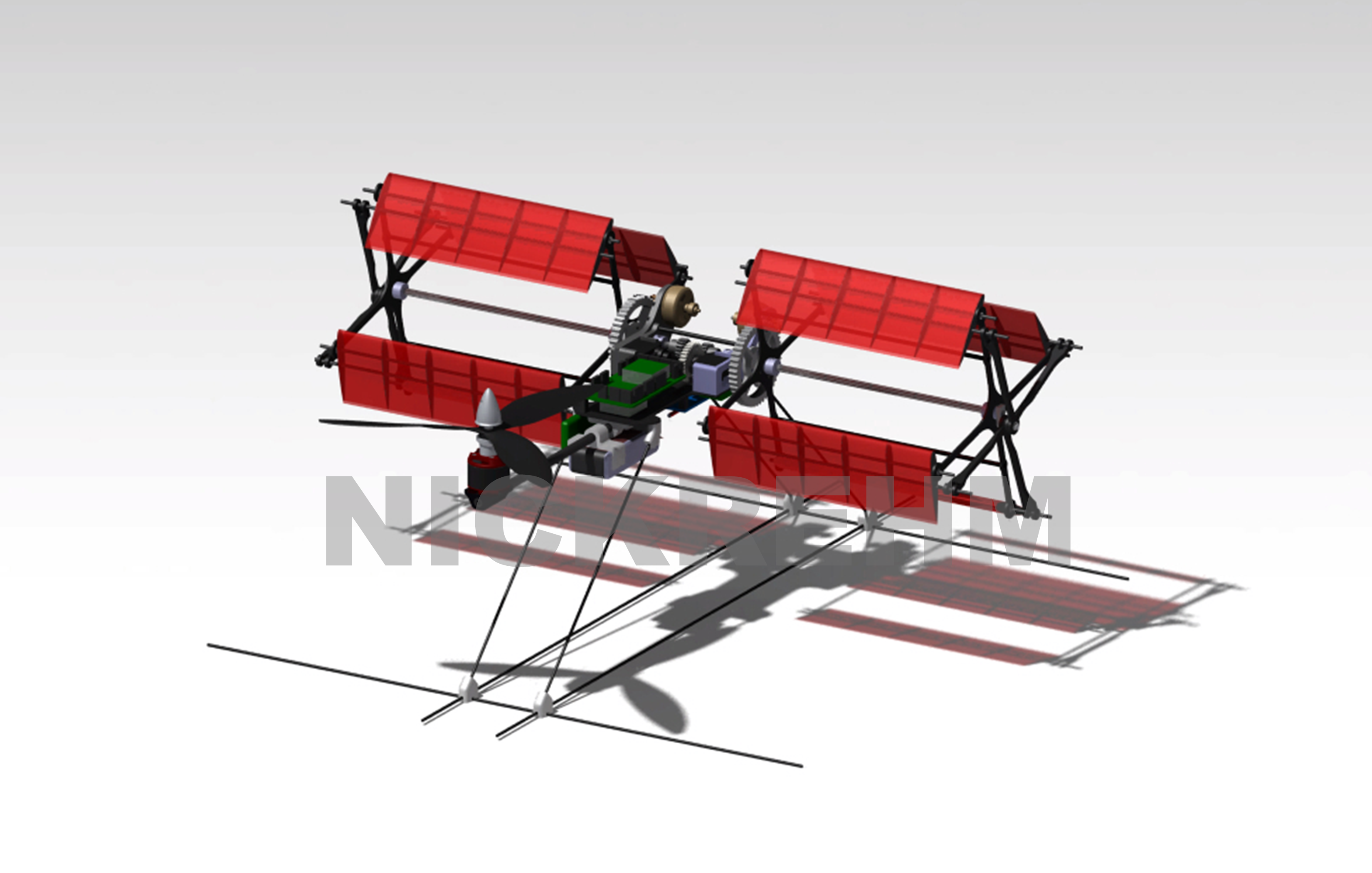
The cyclo in the above video is one that I built, every structural part custom designed, 3D printed, and machined. It runs two 1800kv outrunners geared down to something like 4:1 with a 1300mah 4s, with the separate nose rotor to counteract the torque of the cyclorotors. Flight controllers seemed to be the bottleneck in cyclocopter research prior to recent development (nowadays, you can practically fly anything with a standard flight controller and a little coding know-how).
Here's a CAD render of that vehicle and some pics of the assembly:
 | 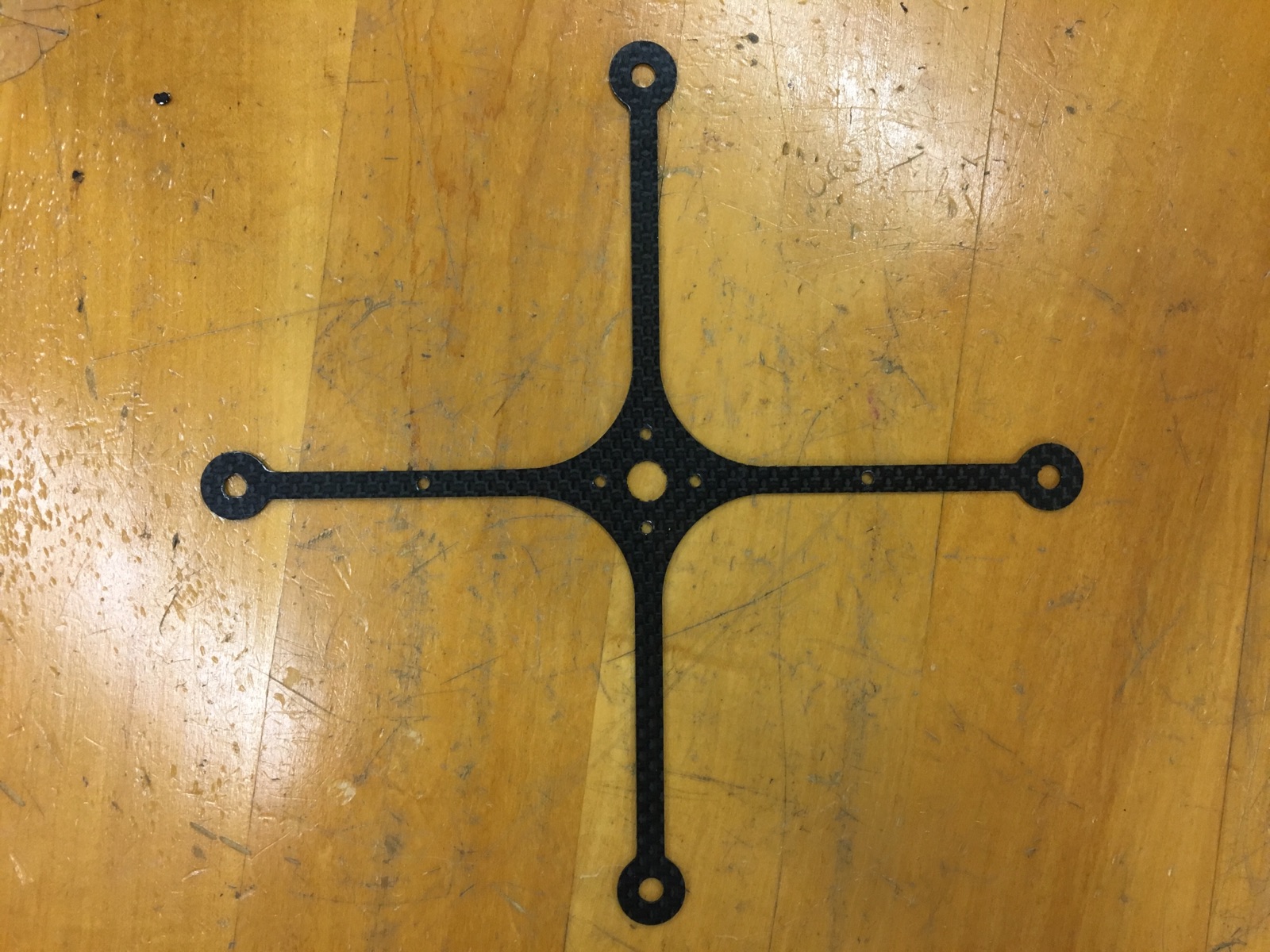 | 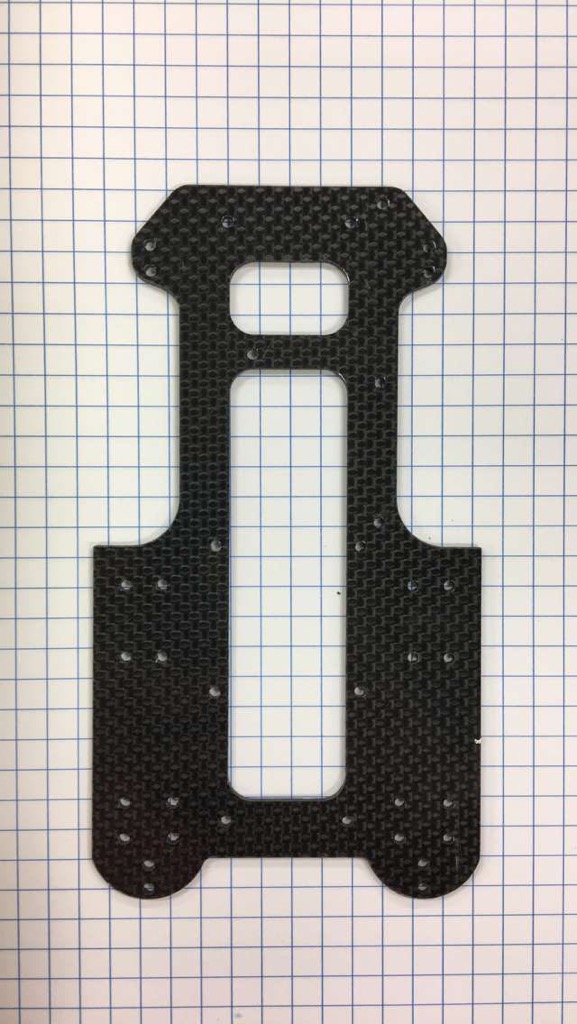 |  |  |
| Motor and phasing servo mounts with bearings for the rotorshaft. | Rotor 'endplate' to support the blades. | Main vehicle mounting frame. | Motor mount assembly. Note that the rotorshaft is actuated by the phasing servo; the actual rotor rotates around this shaft on bearings. | Complete rotor assembly. |
Early flights were tricky with dated flight control hardware and software. Additionally, there's some unique vehicle dynamics at play that lead to coupling of all vehicle axis. Check out these early flights of my cyclocopter:
What's the point?
One of the big advantages of the cyclorotor is the uniform flow experienced by the blades. Flow velocity on a traditional rotor varies with span, meaning special blade geometry is required to generate a semi-even lift distribution along the blade. Additionally, on a traditional helicopter in forward flight, the retreating side stalls and can even experience flow reversal. On a cyclo in forward flight, the only difference in flow is between upper and lower blades, not along the blade. This allows for much more efficient lift generation and optimization of blades. We've seen upwards of 20% reduction in power for the same thrust on a cyclorotor as compared to a conventional rotor of identical disk area. Only a few institutions have demonstrated a flying cyclocopter--a school in Korea (they've done some interesting work with elliptic cyclo blades), Texas A&M, and University of Maryland (where I am from). We have worked closely with Texas A&M, but Maryland cyclo research has fallen off--I'm hoping to revive it a bit this summer. Texas has been working on scale-ability of the cyclocopter from nano scale to larger scale:

Some unique structural challenges arise when you scale one of these things up, particularly from the cantilevered rotor shaft. Texas has flown a 17lb vehicle (above) and even have the smallest flying cyclocopter at ~20 grams (also shown above). Their work continues to focus on the structural challenges of large-scale cyclocopter vehicles.
Some common comments/misconceptions I've seen and my response:
1. "That can't possibly be as efficient as they claim it to be compared to a regular heli"
Theoretically/aerodynamically, it absolutely is. Conventional helicopter rotors are the epitome of optimization compromise in order to allow them to fly in different flight regimes. Uniform flow over the cyclorotors along their span allows for much more efficient generation of lift as compared to a conventional rotor where flow velocity varies with rotor span.
2. "Even if it is more efficient, there must be huge losses from the mechanism"
Currently, kind of. However, the pitching mechanism of a cyclocopter is a simple 4 bar linkage whereas a helicopter swashplate assembly is basically a modern miracle of mechanics. We are just now getting into mechanical optimization and have a while until we catch up to the precision of the optimized rotor head assembly. Previously, cyclocopters had been more of an aerodynamic proof of concept and quite frankly yes--somewhat of a gimmick. The focus had never been on mechanical optimization. Cyclorotors have the potential to be far mechanically simpler than a swashplate assembly with comparable or even less mechanical efficiency losses.
3. "It looks very difficult to fly"
Previous flight controllers developed for this vehicle were definitely limited in their ability to stabilize this vehicle configuration. There is unique dynamic coupling between all axis of the vehicle due to the axis of rotor rotation which makes it difficult but not impossible to stabilize. High enough loop rate and PID control have it feeling like a regular heli in the air now!
Conclusion
I have only scratched the surface on cycocopter research and there is still much more to them than I have presented. However, I hope you have gained a unique appreciation for this different vehicle configuration and feel inspired to think about vertical flight in a new way. Maybe even build your own! It's time that this vehicle escapes the research labs and we let the RC community do what it does best: innovate and improve. How would you design a cyclocopter?
Check out my YouTube to stay up to date with my work on cyclocopters and other small flying vehicles!
More interesting videos:








Log In to reply
1. Is it really cool looking? Yes
2. Is it even more amazing to see it fly? Yes
3. Do I ever see myself building and or attempting to fly one? No.
Your article is very well written and absolutely a great read. It’s super informative on a topic and item that, like others, I had previously never heard of before today. I guess my main issue is, even if it were a thousand times more efficient, and a hundred times easier to fly, outside of a really cool R/C vehicle that is sure to start conversations whether it’s flying, or just sitting on a coffee table, I don’t see a practical use for it. I mean I definitely think it’s a great research project, and if I had the genius you clearly possess, and the knowledge and desire to make something like this fly, I certainly would. You’ve done very well with yours. I just don’t see the point, other than proving a theory. I still admire its beauty and complexity mixed with simplicity, if that’s even a clear concept.
Log In to reply
https://trimis.ec.europa.eu/sites/default/files/project/documents/10138/final1-crop-ga323047-final-report.pdf
DESIGN AND EXPERIMENT OF TWO-ROTORED UAV
CYCLOCOPTER
https://www.icas.org/ICAS_ARCHIVE/ICAS2014/data/papers/2014_0725_paper.pdf
Log In to reply
Log In to reply
Log In to reply
Log In to reply
Log In to reply
Log In to reply
But seriously, this thing has a lot of practical uses. It seems like a really good form of drone to deliver packages autonomously and things like that.
Log In to reply
Cyclo's offer great hovering efficiency advantages--definitely good for large payloads and endurance
Log In to reply