If this helped please donate using the link below, every little helps!
http://goo.gl/GVXav
Multiwii Pro board with GPS tutorial and code for setting up.
Please give 5 stars if it helped!
Advantage of this board over ardupilot 2.5 and other boards.
This board can support both mission planner for ArduPilot and MultiwiiGUI for default multiwii.
This board includes GPS, Magnetometer, Gyros, Accelerometers and barometer.All for $65 or about £35
After looking on hobbyking, I noticed that this was by far the best board for the price, it offered the functionality of the ArduPilot Mega 2.5 with the pricepoint of the hobbyking branded boards.
But the biggest issue with both the multiwii pro and other controller boards was poor explanation of how to flash the board using a compiler.
There were many pages about how to set it up but no one had the initiative to supply the code ready made for you to just download.
And for some this was a deal breaker which is unfortunate because you simply cannot get any other board with this spec for its price.
So i took it upon myself to get the software working and post it ready made with videos on how to use it!
This video gives instruction on how to enable the GPS on your board.
GPS WIRING
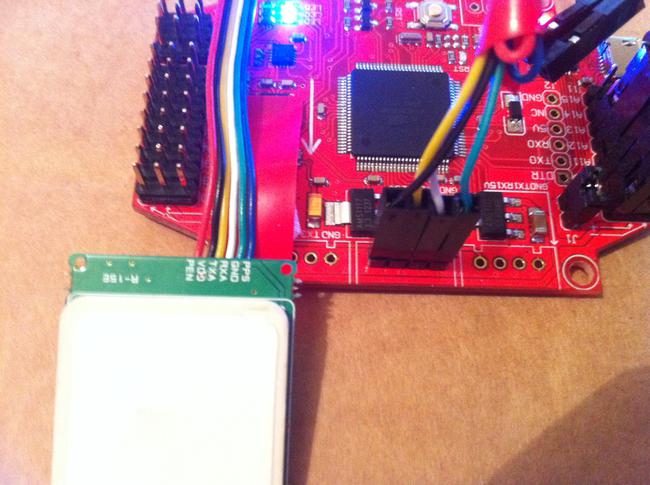
YOU MUST FOLLOW THIS VIDEO if you want your gps to work, but do not try to fly with this software as it is not configured for flight.
Arduino (300mb+)
http://arduino.cc/en/Main/Software
Code (10mb-)
http://sdrv.ms/TYWOB1
Graphical user interface (50mb-)
http://code.google.com/p/mw-wingui/downloads/list
Now you have setup GPS uou have a choice, go for the stock multiwii software or go for the Mega pirate firmware used on the Ardupilot 2.5.
Both videos will be posted below.
This is the stock Multiwii software, it is almost identical to megapirte with 2 exceptions.
(Ignore the 2 exceptions if you want they arent a big deal)
The standard software does not support waypoints, only return to launch and data logging for GPS
Secondly in flight modes where you select Stabalise, rtl, circle etc, The method to select those modes is different, The standard software lets you use 4 aux channels to select each mode whereas the Megapirate only lets you use 1 channel which means if you only have a 2 position switch you can only have two flightmodes on megapirate firmware unless you start mixing.
Code: http://sdrv.ms/UmytGv
Graphical User Interface multiwiiGUI http://code.google.com/p/mw-wingui/downloads/list
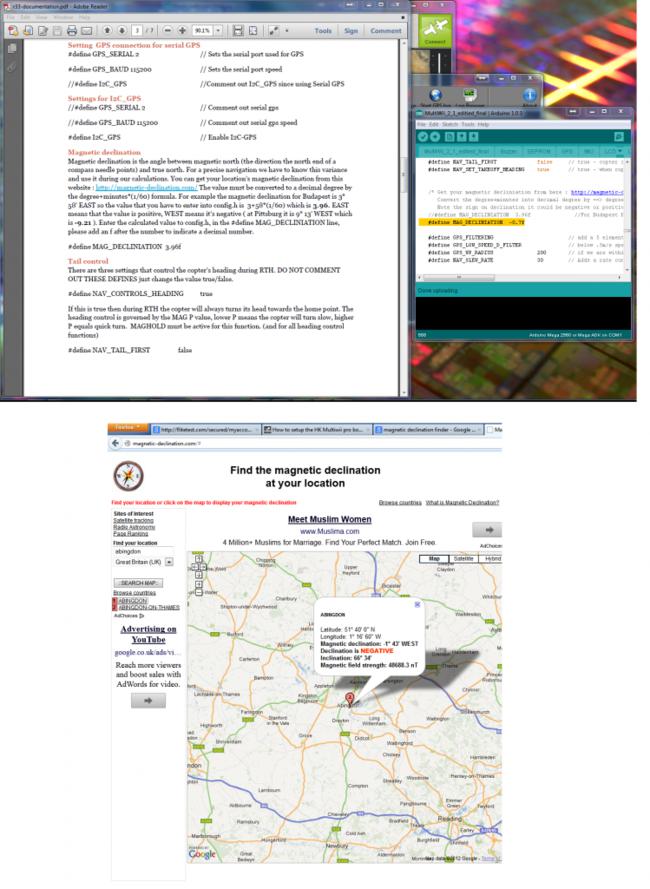
IF you are using multiwii final code you must set the magnetic declination
This is the MegaPirate software and code, far superior in some aspects but somewhat lacking in the small things as mentioned about about flight modes.
Pirate code: http://sdrv.ms/WRqt3K
Mission planner : http://code.google.com/p/ardupilot-mega/downloads/detail?name=Mission%20Planner%201.2.27.zip&can=2&q=
MULTIWII PRO SOFTWARE FOR PLANES!
This software was developed by a fltetest website member named "lobstermash"
He took the time and effort to do it so you do not have to!
I do not have a video on how to set this one up however i do have the direct download link and some info.
http://forum.flitetest.com/attachment.php?attachmentid=7616&d=1357009426
that is the download link and this is the info:
plugged ESC into D2, rudder D3, ailerons D4 and elevator D5. Worked like a charm this time
HOW TO SET UP FRAME TYPE
FOR MULTIWII
FOR MEGAPIRATE
Please message me is you need help
small flight







I loaded the MegaPirate firmware (thanks to your instructions), and finally got everything working (almost everything).
My copter thinks it's a Quad, but it's a Hex. Motors 1 & 3 (Lft & Rt) don't run. How do I configure it so it knows it's a Hex?
Thanks,
J
Log In to reply
sos cap accidentally
i hve video on how to set up for hex
Log In to reply
Log In to reply
Log In to reply
Log In to reply
Log In to reply
Log In to reply
Log In to reply
Log In to reply
Tx must go to rx and rx must go to tx
Log In to reply
Log In to reply
Log In to reply
Log In to reply
if so then it worked because you used the setup software (dev software)
if you did not then you were simply lucky
Log In to reply
Log In to reply
as of December 10th, hobbyking started shipping a newer batch of gps modules that aren't pre programmed.
this dev software simply activates the gps and tells it how to communicate
Log In to reply
Great guide btw which I had it when I got mine.
Log In to reply
Do you know if anyone's working on APNG?
Log In to reply
Log In to reply
Thanks for the inspiration.
Log In to reply
Log In to reply
Log In to reply
Log In to reply
Did a fresh erase and reflash, plugged ESC into D2, rudder D3, ailerons D4 and elevator D5. Worked like a charm this time.
Log In to reply
it should go directly to the receiver should it not?
Log In to reply
Log In to reply
Log In to reply
Log In to reply
Such is the hobby...
OK, I got it setup as a Hexcopter and went out to try my first flight. I tried to power up slowly, but it launched up in the air, flipping violently. In a moment, I cut the power at about 2 feet. I'm balancing 2 more props...and hoping you're up in your timezone. Do you know what I did wrong or what I need to do?
I've calibrated my radio in Mission Planner and calibrated the sensors via Mission Planner.
Log In to reply
then Arducopter PIDs
lower angular rate control P value to 0.08
then take your props off and check that tilting rite makes the rite motors speed up and forward makes the back speed up
Log In to reply
Log In to reply
test on a soft floor carpet or grass
Log In to reply
The motors I chose were the biggest recommended ones... good call.
Log In to reply
"...small weight..."
Log In to reply
Log In to reply
Log In to reply
try disconnecting everything and then connect one motor check it is behaving as it should be by moving the aileron and throttle and do this for each motor to confirm it is correct.
then if it doesn't work, try using the default firmware and see if that works
Log In to reply
Have anybody configured this MegaPirate firmware as a Tricopter?
I changed the frame settings to:
#define FRAME_CONFIG TRI_FRAME
and tried all three frame orientations
#define FRAME_ORIENTATION X_FRAME
#define FRAME_ORIENTATION PLUS_FRAME
#define FRAME_ORIENTATION V_FRAME
In the Mission Planner I have a Quad no matter I change these settings.
Please help.
Log In to reply
Please help me. Thanks! This is the first time trying out MultiWii board and your tutorial is very helpful!
Shane
Log In to reply
Log In to reply
Sorry for my English is translated through Google!
Thank you!!!
Log In to reply
Log In to reply
Log In to reply
Having difficulty getting GPS to work. I've followed the setup video for the GPS exactly and triple checked that my wiring from the FC to the GPS is correct and still no GPS signal.? Com port is correct and speed is set to 115200. Everything else seems to be working fine. PKT light is not flashing at all (solid red) but the home light is lit green. Any ideas?
Log In to reply
Have you swapped the TX and RX leads so the gps tx goes to the boards RX and the GPS rx goes to the boards TX?
Log In to reply
Log In to reply
You will have to look at the chip and see what it is then select in arduino
Log In to reply
I need a detailed tutorial, step by step, to assembly and configure the quadcopter, with all the components (gps, radio control). May be Talk through Skype if neccesary.
I bought the following devices in hobby King:
- Multiwii Mega 2560 board.
- Qbrain 4x20A ESC
- Receiver and radio control Turnigy 9x.
- GPS GStar MTK-3329
- Bumblebee Carbon Fiber Quadcopter Frame
- Camera Gimbal Tilt Mount for Bumblebee Quadcopter Frame
I can pay via paypal, $25 at the beginnig and $25 when the quadcopter flies.
Please contact me if you are interested in help me. Thanks in advance.
Log In to reply
email ox141jf@hotmail.co.uk
i can help after work
Log In to reply
Log In to reply
Log In to reply
Avrdude: stk500v2_receivemessage (): timeout
Avrdude: stk500v2_getsync () : timeout communicating with programmer
Log In to reply
AP-int16 does not name a type
Any ideas
Regards rob
Log In to reply
i got this error msg
AP-int16 does not name a type
Any ideas
cheers dave
Log In to reply
I've set my MultiWii on my plane. GPS works as the RTH and Loiter mode works nice, but when I switch to "Guided" mode, as I have written my points on the MissionPlanner, my plane dives as if the altitude is wrongly given. I have tried relative and absolute altitude for my points. I'm working with meters units for the height, but do you think there might be a mistake and I should give the altitude of my WP in feet?
Thx for your work!
Log In to reply
I have the Multiwii on my quadcopter and i have followed all your instructions and wiring procedures too for the GPS. I have the MTK-3329 GPS. I still cannot get the PKT light to blink on the GUI and the GPS never flashes its red LED, its just stays on as a solid dim red light. Any help would be appreciated.
Thanks
Log In to reply
I need a detailed tutorial, step by step, to assembly and configure the quadcopter, with all the components (gps, radio control). May be Talk through Skype if neccesary.
I bought the following devices in hobby King:
- Multiwii Mega 2560 board.
- Qbrain 4x20A ESC
- Receiver and radio control Turnigy 9x.
- GPS GStar MTK-3329
- Bumblebee Carbon Fiber Quadcopter Frame
- Camera Gimbal Tilt Mount for Bumblebee Quadcopter Frame
I can pay via paypal, $25 at the beginnig and $25 when the quadcopter flies.
Please contact me if you are interested in help me. Thanks in advance.
Log In to reply
Log In to reply
if so, are you plugging the motors into the correct ports.
if so have you tried to take off in a hover or does it just flip
Log In to reply
Log In to reply
Log In to reply
It would be very useful also if you could load some pics with the receiver connection because i am not sure if i have done it correctly
Log In to reply
I am building a Quadx with the Multiwii pro running Qbrain 25aX4. I have installed the 2.1 and when I plug the power up the LEDs on the board light up and I cannot activate the motors or anything. It's as if the motors won't engage/disengage. Has anyone come across this? Now, I have already successfully setup the GPS, but since I am trying to rotation from the motors i am doing this all inside. Therefore, I do not have the gps plugged in. Could this be my issue, also if this is would the gps have to have signal in order to get the rotation from the motors?
Thanks all for your time.
Best regards,
MH
Log In to reply
Log In to reply
Log In to reply
Log In to reply
Log In to reply
I've been struggling with that board for a while now (this is my first multirotor built) and my problem is B...DY GPS I can't get it to work I've already spent hours on different forums and yt tutorials and when I found your guide I thought that I'm finally over that problem. But I'm not that lucky even your guide didn't help me. The module is definitely connected correctly VDD -> 5V, TXA -> RX2, RXA -> TX2, GND -> GND but no matter what I try what firmware I upload what guide I fallow NOTHING, big NOTHING, so I'm thinking that maybe the module is faulty ? There is a smal LED on the module it self when it needs to light up ? cause it never does. I've checked the 5v out on port 2 with multimeter and it has the power so why that B...DY GPS don't want come alive ? Can you try to help me please. Thank You
Log In to reply
I can't arm it with just my ESCs and I don't want to buy any UBEC. So I'll either build a little voltage regulator or connect my ESCs in series, but I need to know if I'm gonna fry my board or not!!!
Thanks guys
Log In to reply
Log In to reply
I've read somewhere that you can put up to 11V in any FC board without damage...is it true? Just out of curiosity, I'm not exceeding 6V anyways...
Log In to reply
What I did was buy a voltage regulator LM7805 (~$0.40), plug in parallel wires from the battery and feed the board on one of the empty ESCs/Servos pins.
Seems to work really good and reliable for a really cheap price.
Log In to reply
Log In to reply
core.a(main.cpp.o): In function `main':
C:\Program Files (x86)\Arduino\hardware\arduino\cores\arduino/main.cpp:5: undefined reference to `setup'
C:\Program Files (x86)\Arduino\hardware\arduino\cores\arduino/main.cpp:15: undefined reference to `loop'
Any chance you could help me with this?
Thanks
Log In to reply
I am new here, I read the whole article and I found it very interesting -- I have one question, I am trying to get the code but when I copy and paste the link - an error message pops up on the new window saying (( Sorry, Something Went Wrong)) the link takes me to Microsoft One Drive website -- please help
Log In to reply
In file included from ArduCopter28.ino:117:
Parameters.h:221: error: 'AP_Int16' does not name a type
Parameters.h:222: error: 'AP_Int8' does not name a type
Parameters.h:226: error: 'AP_Int16' does not name a type
Parameters.h:227: error: 'AP_Int16' does not name a type
Parameters.h:228: error: 'AP_Int8' does not name a type
Parameters.h:229: error: 'AP_Int8' does not name a type
Parameters.h:231: error: 'AP_Int16' does not name a type
Parameters.h:232: error: 'AP_Int8' does not name a type
Parameters.h:233: error: 'AP_Int8' does not name a type
Parameters.h:236: error: 'AP_Int8' does not name a type
Parameters.h:238: error: 'AP_Float' does not name a type
Parameters.h:239: error: 'AP_Float' does not name a type
Parameters.h:240: error: 'AP_Float' does not name a type
Parameters.h:241: error: 'AP_Int16' does not name a type
Parameters.h:243: error: 'AP_Int8' does not name a type
Parameters.h:244: error: 'AP_Int8' does not name a type
Parameters.h:245: error: 'AP_Float' does not name a type
Parameters.h:246: error: 'AP_Int8' does not name a type
Parameters.h:247: error: 'AP_Int16' does not name a type
Parameters.h:248: error: 'AP_Int8' does not name a type
Parameters.h:249: error: 'AP_Int8' does not name a type
Parameters.h:250: error: 'AP_Int8' does not name a type
Parameters.h:253: error: 'AP_Int8' does not name a type
Parameters.h:254: error: 'AP_Int8' does not name a type
Parameters.h:258: error: 'AP_Int8' does not name a type
Parameters.h:259: error: 'AP_Int8' does not name a type
Parameters.h:260: error: 'AP_Int8' does not name a type
Parameters.h:261: error: 'AP_Int8' does not name a type
Parameters.h:262: error: 'AP_Int16' does not name a type
Parameters.h:263: error: 'AP_Int16' does not name a type
Parameters.h:264: error: 'AP_Int16' does not name a type
Parameters.h:265: error: 'AP_Float' does not name a type
Parameters.h:266: error: 'AP_Int32' does not name a type
Parameters.h:271: error: 'AP_Int16' does not name a type
Parameters.h:272: error: 'AP_Int16' does not name a type
Parameters.h:273: error: 'AP_Int8' does not name a type
Parameters.h:274: error: 'AP_Int8' does not name a type
Parameters.h:275: error: 'AP_Int16' does not name a type
Parameters.h:276: error: 'AP_Int16' does not name a type
Parameters.h:280: error: 'AP_Int8' does not name a type
Parameters.h:281: error: 'AP_Int8' does not name a type
Parameters.h:282: error: 'AP_Int8' does not name a type
Parameters.h:283: error: 'AP_Int8' does not name a type
Parameters.h:284: error: 'AP_Int8' does not name a type
Parameters.h:285: error: 'AP_Int8' does not name a type
Parameters.h:286: error: 'AP_Int8' does not name a type
Parameters.h:290: error: 'AP_Int16' does not name a type
Parameters.h:291: error: 'AP_Int16' does not name a type
Parameters.h:294: error: 'AP_Int8' does not name a type
Parameters.h:299: error: 'AP_Int8' does not name a type
Parameters.h:300: error: 'AP_Int8' does not name a type
Parameters.h:301: error: 'AP_Int16' does not name a type
Parameters.h:302: error: 'AP_Int16' does not name a type
Parameters.h:303: error: 'AP_Int8' does not name a type
Parameters.h:304: error: 'AP_Int8' does not name a type
Parameters.h:305: error: 'AP_Int16' does not name a type
Parameters.h:320: error: 'AP_Camera' does not name a type
Parameters.h:324: error: 'RC_Channel' does not name a type
Parameters.h:325: error: 'RC_Channel' does not name a type
Parameters.h:326: error: 'RC_Channel' does not name a type
Parameters.h:327: error: 'RC_Channel' does not name a type
Parameters.h:328: error: 'RC_Channel_aux' does not name a type
Parameters.h:329: error: 'RC_Channel_aux' does not name a type
Parameters.h:330: error: 'RC_Channel_aux' does not name a type
Parameters.h:331: error: 'RC_Channel_aux' does not name a type
Parameters.h:334: error: 'RC_Channel_aux' does not name a type
Parameters.h:335: error: 'RC_Channel_aux' does not name a type
Parameters.h:337: error: 'AP_Int16' does not name a type
Parameters.h:339: error: 'AP_Float' does not name a type
Parameters.h:340: error: 'AP_Float' does not name a type
Parameters.h:343: error: 'AP_Float' does not name a type
Parameters.h:344: error: 'AP_Float' does not name a type
Parameters.h:345: error: 'AP_Int16' does not name a type
Parameters.h:346: error: 'AP_Int16' does not name a type
Parameters.h:349: error: 'AC_PID' does not name a type
Parameters.h:350: error: 'AC_PID' does not name a type
Parameters.h:351: error: 'AC_PID' does not name a type
Parameters.h:352: error: 'AC_PID' does not name a type
Parameters.h:353: error: 'AC_PID' does not name a type
Parameters.h:354: error: 'AC_PID' does not name a type
Parameters.h:355: error: 'AC_PID' does not name a type
Parameters.h:357: error: 'AC_PID' does not name a type
Parameters.h:358: error: 'AC_PID' does not name a type
Parameters.h:359: error: 'AC_PID' does not name a type
Parameters.h:361: error: 'APM_PI' does not name a type
Parameters.h:362: error: 'APM_PI' does not name a type
Parameters.h:363: error: 'APM_PI' does not name a type
Parameters.h:364: error: 'APM_PI' does not name a type
Parameters.h:365: error: 'APM_PI' does not name a type
Parameters.h:366: error: 'APM_PI' does not name a type
/Parameters.h: In constructor 'Parameters::Parameters()':
Parameters.h:379: error: class 'Parameters' does not have any field named 'rc_1'
Parameters.h:379: error: 'CH_1' was not declared in this scope
Parameters.h:380: error: class 'Parameters' does not have any field named 'rc_2'
Parameters.h:380: error: 'CH_2' was not declared in this scope
Parameters.h:381: error: class 'Parameters' does not have any field named 'rc_3'
Parameters.h:381: error: 'CH_3' was not declared in this scope
Parameters.h:382: error: class 'Parameters' does not have any field named 'rc_4'
Parameters.h:382: error: 'CH_4' was not declared in this scope
Parameters.h:383: error: class 'Parameters' does not have any field named 'rc_5'
Parameters.h:383: error: 'CH_5' was not declared in this scope
Parameters.h:384: error: class 'Parameters' does not have any field named 'rc_6'
Parameters.h:384: error: 'CH_6' was not declared in this scope
Parameters.h:385: error: class 'Parameters' does not have any field named 'rc_7'
Parameters.h:385: error: 'CH_7' was not declared in this scope
Parameters.h:386: error: class 'Parameters' does not have any field named 'rc_8'
Parameters.h:386: error: 'CH_8' was not declared in this scope
Parameters.h:388: error: class 'Parameters' does not have any field named 'rc_10'
Parameters.h:388: error: 'CH_10' was not declared in this scope
Parameters.h:389: error: class 'Parameters' does not have any field named 'rc_11'
Parameters.h:389: error: 'CH_11' was not declared in this scope
Parameters.h:395: error: class 'Parameters' does not have any field named 'pid_rate_roll'
Parameters.h:396: error: class 'Parameters' does not have any field named 'pid_rate_pitch'
Parameters.h:397: error: class 'Parameters' does not have any field named 'pid_rate_yaw'
Parameters.h:399: error: class 'Parameters' does not have any field named 'pid_loiter_rate_lat'
Parameters.h:400: error: class 'Parameters' does not have any field named 'pid_loiter_rate_lon'
Parameters.h:402: error: class 'Parameters' does not have any field named 'pid_nav_lat'
Parameters.h:403: error: class 'Parameters' does not have any field named 'pid_nav_lon'
Parameters.h:405: error: class 'Parameters' does not have any field named 'pid_throttle'
Parameters.h:406: error: class 'Parameters' does not have any field named 'pid_optflow_roll'
Parameters.h:407: error: class 'Parameters' does not have any field named 'pid_optflow_pitch'
Parameters.h:412: error: class 'Parameters' does not have any field named 'pi_loiter_lat'
Parameters.h:413: error: class 'Parameters' does not have any field named 'pi_loiter_lon'
Parameters.h:415: error: class 'Parameters' does not have any field named 'pi_stabilize_roll'
Parameters.h:416: error: class 'Parameters' does not have any field named 'pi_stabilize_pitch'
Parameters.h:417: error: class 'Parameters' does not have any field named 'pi_stabilize_yaw'
Parameters.h:419: error: class 'Parameters' does not have any field named 'pi_alt_hold'
/Parameters.h: At global scope:
Parameters.h:424: error: 'AP_Param' has not been declared
Parameters.h:424: error: expected initializer before 'var_info'
In file included from ArduCopter28.ino:118:
GCS.h:43: error: 'FastSerial' has not been declared
GCS.h:80: error: expected ',' or '...' before '*' token
GCS.h:80: error: ISO C++ forbids declaration of 'prog_char_t' with no type
GCS.h:94: error: ISO C++ forbids declaration of 'FastSerial' with no type
GCS.h:94: error: expected ';' before '*' token
/GCS.h: In member function 'void GCS_Class::init(int*)':
GCS.h:44: error: '_port' was not declared in this scope
/GCS.h: At global scope:
GCS.h:113: error: 'FastSerial' has not been declared
GCS.h:116: error: expected ',' or '...' before '*' token
GCS.h:116: error: ISO C++ forbids declaration of 'prog_char_t' with no type
GCS.h:121: error: 'AP_Param' has not been declared
GCS.h:141: error: 'mavlink_message_t' has not been declared
GCS.h:145: error: ISO C++ forbids declaration of 'AP_Param' with no type
GCS.h:145: error: expected ';' before '*' token
GCS.h:147: error: use of enum 'ap_var_type' without previous declaration
GCS.h:149: error: 'AP_Param' has not been declared
GCS.h:149: error: ISO C++ forbids declaration of 'ParamToken' with no type
GCS.h:149: error: expected ';' before '_queued_parameter_token'
GCS.h:173: error: 'mavlink_channel_t' does not name a type
GCS.h:196: error: 'AP_Int16' does not name a type
GCS.h:197: error: 'AP_Int16' does not name a type
GCS.h:198: error: 'AP_Int16' does not name a type
GCS.h:199: error: 'AP_Int16' does not name a type
GCS.h:200: error: 'AP_Int16' does not name a type
GCS.h:201: error: 'AP_Int16' does not name a type
GCS.h:202: error: 'AP_Int16' does not name a type
GCS.h:203: error: 'AP_Int16' does not name a type
GCS.h:204: error: 'AP_Int16' does not name a type
ArduCopter28:222: error: variable or field 'send_heartbeat' declared void
ArduCopter28:222: error: 'mavlink_channel_t' was not declared in this scope
ArduCopter28:223: error: variable or field 'send_attitude' declared void
ArduCopter28:223: error: 'mavlink_channel_t' was not declared in this scope
ArduCopter28:224: error: variable or field 'send_limits_status' declared void
ArduCopter28:224: error: 'mavlink_channel_t' was not declared in this scope
ArduCopter28:225: error: variable or field 'send_extended_status1' declared void
ArduCopter28:225: error: 'mavlink_channel_t' was not declared in this scope
ArduCopter28:225: error: expected primary-expression before 'packet_drops'
ArduCopter28:226: error: variable or field 'send_meminfo' declared void
ArduCopter28:226: error: 'mavlink_channel_t' was not declared in this scope
ArduCopter28:227: error: variable or field 'send_location' declared void
ArduCopter28:227: error: 'mavlink_channel_t' was not declared in this scope
ArduCopter28:228: error: variable or field 'send_nav_controller_output' declared void
ArduCopter28:228: error: 'mavlink_channel_t' was not declared in this scope
ArduCopter28:229: error: variable or field 'send_ahrs' declared void
ArduCopter28:229: error: 'mavlink_channel_t' was not declared in this scope
ArduCopter28:230: error: variable or field 'send_simstate' declared void
ArduCopter28:230: error: 'mavlink_channel_t' was not declared in this scope
ArduCopter28:231: error: variable or field 'send_hwstatus' declared void
ArduCopter28:231: error: 'mavlink_channel_t' was not declared in this scope
ArduCopter28:232: error: variable or field 'send_gps_raw' declared void
ArduCopter28:232: error: 'mavlink_channel_t' was not declared in this scope
ArduCopter28:233: error: variable or field 'send_servo_out' declared void
ArduCopter28:233: error: 'mavlink_channel_t' was not declared in this scope
ArduCopter28:234: error: variable or field 'send_radio_in' declared void
ArduCopter28:234: error: 'mavlink_channel_t' was not declared in this scope
ArduCopter28:235: error: variable or field 'send_radio_out' declared void
ArduCopter28:235: error: 'mavlink_channel_t' was not declared in this scope
ArduCopter28:236: error: variable or field 'send_vfr_hud' declared void
ArduCopter28:236: error: 'mavlink_channel_t' was not declared in this scope
ArduCopter28:237: error: variable or field 'send_raw_imu1' declared void
ArduCopter28:237: error: 'mavlink_channel_t' was not declared in this scope
ArduCopter28:238: error: variable or field 'send_raw_imu2' declared void
ArduCopter28:238: error: 'mavlink_channel_t' was not declared in this scope
ArduCopter28:239: error: variable or field 'send_raw_imu3' declared void
ArduCopter28:239: error: 'mavlink_channel_t' was not declared in this scope
ArduCopter28:240: error: variable or field 'send_gps_status' declared void
ArduCopter28:240: error: 'mavlink_channel_t' was not declared in this scope
ArduCopter28:241: error: variable or field 'send_current_waypoint' declared void
ArduCopter28:241: error: 'mavlink_channel_t' was not declared in this scope
ArduCopter28:242: error: variable or field 'send_statustext' declared void
ArduCopter28:242: error: 'mavlink_channel_t' was not declared in this scope
ArduCopter28:243: error: 'mavlink_channel_t' was not declared in this scope
ArduCopter28:244: error: 'mavlink_channel_t' was not declared in this scope
ArduCopter28:244: error: expected primary-expression before 'enum'
ArduCopter28:244: error: expected primary-expression before 'packet_drops'
ArduCopter28:244: error: initializer expression list treated as compound expression
ArduCopter28:245: error: variable or field 'mavlink_send_message' declared void
ArduCopter28:245: error: 'mavlink_channel_t' was not declared in this scope
ArduCopter28:245: error: expected primary-expression before 'enum'
ArduCopter28:245: error: expected primary-expression before 'packet_drops'
ArduCopter28:246: error: variable or field 'mavlink_send_text' declared void
ArduCopter28:246: error: 'mavlink_channel_t' was not declared in this scope
ArduCopter28:246: error: expected primary-expression before 'severity'
ArduCopter28:246: error: expected primary-expression before 'const'
ArduCopter28:252: error: expected ',' or '...' before '*' token
ArduCopter28:252: error: ISO C++ forbids declaration of 'prog_char_t' with no type
ArduCopter28:253: error: variable or field 'print_latlon' declared void
ArduCopter28:253: error: 'BetterStream' was not declared in this scope
ArduCopter28:253: error: 's' was not declared in this scope
ArduCopter28:253: error: expected primary-expression before 'lat_or_lon'
ArduCopter28:440: error: variable or field 'limits_send_mavlink_status' declared void
ArduCopter28:440: error: 'mavlink_channel_t' was not declared in this scope
ArduCopter28:500: error: expected initializer before '*' token
ArduCopter28:142: error: expected constructor, destructor, or type conversion before '(' token
ArduCopter28:146: error: expected constructor, destructor, or type conversion before '(' token
ArduCopter28:147: error: expected constructor, destructor, or type conversion before '(' token
ArduCopter28:153: error: 'AP_Param' does not name a type
ArduCopter28:155: error: 'Arduino_Mega_ISR_Registry' does not name a type
ArduCopter28:188: error: 'APM_RC_PIRATES' does not name a type
ArduCopter28:218: error: expected initializer before '*' token
ArduCopter28:221: error: expected initializer before '*' token
ArduCopter28:248: error: 'AP_Baro_BMP085_Pirates' does not name a type
ArduCopter28:262: error: 'AP_GPS_NMEA' does not name a type
ArduCopter28:294: error: 'AP_InertialSensor_Pirates' does not name a type
ArduCopter28:296: error: 'AP_IMU_INS' does not name a type
ArduCopter28:300: error: expected initializer before '*' token
ArduCopter28:302: error: 'AP_AHRS_DCM' does not name a type
ArduCopter28:308: error: 'AP_Compass_HMC5843_Pirates' does not name a type
ArduCopter28:346: error: 'AP_TimerProcess' does not name a type
ArduCopter28:358: error: 'ModeFilterInt16_Size5' does not name a type
ArduCopter28:363: error: 'AP_AnalogSource_PIRATES' does not name a type
ArduCopter28:371: error: 'AP_RangeFinder_ME007' does not name a type
ArduCopter28:467: error: 'AP_MotorsHexa' does not name a type
ArduCopter28:493: error: 'Vector3f' does not name a type
ArduCopter28:624: error: 'AP_LeadFilter' does not name a type
ArduCopter28:625: error: 'AP_LeadFilter' does not name a type
ArduCopter28:627: error: 'AverageFilterInt32_Size3' does not name a type
ArduCopter28:628: error: 'AverageFilterInt32_Size3' does not name a type
ArduCopter28:631: error: 'AverageFilterInt32_Size5' does not name a type
ArduCopter28:653: error: aggregate 'Location circle_WP' has incomplete type and cannot be defined
ArduCopter28:760: error: aggregate 'Location home' has incomplete type and cannot be defined
ArduCopter28:764: error: aggregate 'Location current_loc' has incomplete type and cannot be defined
ArduCopter28:766: error: aggregate 'Location filtered_loc' has incomplete type and cannot be defined
ArduCopter28:768: error: aggregate 'Location next_WP' has incomplete type and cannot be defined
ArduCopter28:770: error: aggregate 'Location prev_WP' has incomplete type and cannot be defined
ArduCopter28:772: error: aggregate 'Location command_nav_queue' has incomplete type and cannot be defined
ArduCopter28:774: error: aggregate 'Location command_cond_queue' has incomplete type and cannot be defined
ArduCopter28:776: error: aggregate 'Location guided_WP' has incomplete type and cannot be defined
ArduCopter28:840: error: 'MAV_ROI_WPNEXT' was not declared in this scope
ArduCopter28:857: error: aggregate 'Location target_WP' has incomplete type and cannot be defined
ArduCopter28:956: error: 'AP_Relay' does not name a type
ArduCopter28:964: error: expected ',' or '...' before '::' token
ArduCopter28:964: error: ISO C++ forbids declaration of 'Menu' with no type
ArduCopter28:972: error: 'AP_Mount' does not name a type
ArduCopter28:990: error: 'AP_Limits' does not name a type
ArduCopter28:992: error: 'AP_Limit_GPSLock' does not name a type
ArduCopter28:994: error: 'AP_Limit_Geofence' does not name a type
ArduCopter28:996: error: 'AP_Limit_Altitude' does not name a type
ArduCopter28.ino: In function 'void setup()':
ArduCopter28:1005: error: 'memcheck_init' was not declared in this scope
ArduCopter28.ino: In function 'void loop()':
ArduCopter28:1015: error: 'imu' was not declared in this scope
ArduCopter28:1074: error: 'class Parameters' has no member named 'log_bitmask'
ArduCopter28.ino: In function 'void medium_loop()':
ArduCopter28:1159: error: 'class Parameters' has no member named 'compass_enabled'
ArduCopter28:1160: error: 'compass' was not declared in this scope
ArduCopter28:1171: error: 'class Parameters' has no member named 'rc_3'
ArduCopter28:1192: error: 'class Parameters' has no member named 'log_bitmask'
ArduCopter28:1192: error: 'motors' was not declared in this scope
ArduCopter28:1222: error: 'class Parameters' has no member named 'command_total'
ArduCopter28:1227: error: 'motors' was not declared in this scope
ArduCopter28:1228: error: 'class Parameters' has no member named 'log_bitmask'
ArduCopter28:1235: error: 'class Parameters' has no member named 'log_bitmask'
ArduCopter28:1245: error: 'class Parameters' has no member named 'battery_monitoring'
ArduCopter28.ino: In function 'void fifty_hz_loop()':
ArduCopter28:1293: error: 'class Parameters' has no member named 'sonar_enabled'
ArduCopter28:1294: error: 'sonar' was not declared in this scope
ArduCopter28:1314: error: 'camera_mount' was not declared in this scope
ArduCopter28:1323: error: 'class Parameters' has no member named 'camera'
ArduCopter28:1327: error: 'class Parameters' has no member named 'log_bitmask'
ArduCopter28:1327: error: 'motors' was not declared in this scope
ArduCopter28:1334: error: 'class Parameters' has no member named 'log_bitmask'
ArduCopter28:1334: error: 'motors' was not declared in this scope
ArduCopter28.ino: In function 'void slow_loop()':
ArduCopter28:1368: error: 'class Parameters' has no member named 'rc_3'
ArduCopter28:1368: error: 'class Parameters' has no member named 'compass_enabled'
ArduCopter28:1369: error: 'compass' was not declared in this scope
ArduCopter28:1376: error: 'motors' was not declared in this scope
ArduCopter28:1377: error: 'class Parameters' has no member named 'log_bitmask'
ArduCopter28:1381: error: 'class Parameters' has no member named 'frame_orientation'
ArduCopter28:1394: error: 'class Parameters' has no member named 'rc_5'
ArduCopter28:1394: error: 'class Parameters' has no member named 'rc_6'
ArduCopter28:1394: error: 'class Parameters' has no member named 'rc_7'
ArduCopter28:1394: error: 'class Parameters' has no member named 'rc_8'
ArduCopter28:1394: error: 'class Parameters' has no member named 'rc_10'
ArduCopter28:1394: error: 'class Parameters' has no member named 'rc_11'
ArduCopter28:1394: error: 'update_aux_servo_function' was not declared in this scope
ArduCopter28:1396: error: 'enable_aux_servos' was not declared in this scope
ArduCopter28:1399: error: 'camera_mount' was not declared in this scope
ArduCopter28:1420: error: 'class Parameters' has no member named 'radio_tuning'
ArduCopter28.ino: In function 'void super_slow_loop()':
ArduCopter28:1438: error: 'class Parameters' has no member named 'log_bitmask'
ArduCopter28:1438: error: 'motors' was not declared in this scope
ArduCopter28:1450: error: 'class Parameters' has no member named 'rc_3'
ArduCopter28.ino: In function 'void update_GPS()':
ArduCopter28:1513: error: 'g_gps' was not declared in this scope
ArduCopter28:1565: error: 'class Parameters' has no member named 'compass_enabled'
ArduCopter28:1567: error: 'compass' was not declared in this scope
ArduCopter28:1580: error: 'class Parameters' has no member named 'log_bitmask'
ArduCopter28:1580: error: 'motors' was not declared in this scope
ArduCopter28.ino: In function 'void update_yaw_mode()':
ArduCopter28:1599: error: 'class Parameters' has no member named 'axis_enabled'
ArduCopter28:1600: error: 'class Parameters' has no member named 'rc_4'
ArduCopter28:1602: error: 'class Parameters' has no member named 'rc_4'
ArduCopter28:1613: error: 'class Parameters' has no member named 'rc_4'
ArduCopter28.ino: In function 'void update_roll_pitch_mode()':
ArduCopter28:1633: error: 'class Parameters' has no member named 'rc_1'
ArduCopter28:1633: error: 'class Parameters' has no member named 'rc_1'
ArduCopter28:1633: error: 'class Parameters' has no member named 'rc_1'
ArduCopter28:1644: error: 'class Parameters' has no member named 'axis_enabled'
ArduCopter28:1645: error: 'class Parameters' has no member named 'rc_1'
ArduCopter28:1646: error: 'class Parameters' has no member named 'rc_2'
ArduCopter28:1658: error: 'class Parameters' has no member named 'rc_1'
ArduCopter28:1659: error: 'class Parameters' has no member named 'rc_2'
ArduCopter28:1670: error: 'class Parameters' has no member named 'rc_1'
ArduCopter28:1671: error: 'class Parameters' has no member named 'rc_2'
ArduCopter28:1684: error: 'class Parameters' has no member named 'auto_slew_rate'
ArduCopter28:1684: error: 'class Parameters' has no member named 'auto_slew_rate'
ArduCopter28:1684: error: 'class Parameters' has no member named 'auto_slew_rate'
ArduCopter28:1684: error: 'class Parameters' has no member named 'auto_slew_rate'
ArduCopter28:1685: error: 'class Parameters' has no member named 'auto_slew_rate'
ArduCopter28:1685: error: 'class Parameters' has no member named 'auto_slew_rate'
ArduCopter28:1685: error: 'class Parameters' has no member named 'auto_slew_rate'
ArduCopter28:1685: error: 'class Parameters' has no member named 'auto_slew_rate'
ArduCopter28:1687: error: 'class Parameters' has no member named 'rc_1'
ArduCopter28:1688: error: 'class Parameters' has no member named 'rc_2'
ArduCopter28:1700: error: 'class Parameters' has no member named 'rc_1'
ArduCopter28:1701: error: 'class Parameters' has no member named 'rc_2'
ArduCopter28:1715: error: 'class Parameters' has no member named 'rc_3'
ArduCopter28:1732: error: 'class Parameters' has no member named 'stabilize_d_schedule'
ArduCopter28:1732: error: 'class Parameters' has no member named 'rc_1'
ArduCopter28:1732: error: 'class Parameters' has no member named 'rc_1'
ArduCopter28:1732: error: 'class Parameters' has no member named 'rc_1'
ArduCopter28:1734: error: 'class Parameters' has no member named 'stabilize_d'
ArduCopter28:1736: error: 'class Parameters' has no member named 'stabilize_d_schedule'
ArduCopter28:1736: error: 'class Parameters' has no member named 'rc_2'
ArduCopter28:1736: error: 'class Parameters' has no member named 'rc_2'
ArduCopter28:1736: error: 'class Parameters' has no member named 'rc_2'
ArduCopter28:1738: error: 'class Parameters' has no member named 'stabilize_d'
ArduCopter28.ino: In function 'void update_simple_mode()':
ArduCopter28:1752: error: 'ahrs' was not declared in this scope
ArduCopter28:1765: error: 'class Parameters' has no member named 'rc_1'
ArduCopter28:1765: error: 'class Parameters' has no member named 'rc_2'
ArduCopter28:1766: error: 'class Parameters' has no member named 'rc_1'
ArduCopter28:1766: error: 'class Parameters' has no member named 'rc_2'
ArduCopter28:1768: error: 'class Parameters' has no member named 'rc_1'
ArduCopter28:1769: error: 'class Parameters' has no member named 'rc_2'
ArduCopter28.ino: In function 'void update_throttle_mode()':
ArduCopter28:1790: error: 'class Parameters' has no member named 'rc_3'
ArduCopter28:1792: error: 'class Parameters' has no member named 'throttle_cruise'
ArduCopter28:1798: error: 'class Parameters' has no member named 'rc_3'
ArduCopter28:1803: error: 'class Parameters' has no member named 'rc_3'
ArduCopter28:1803: error: 'class Parameters' has no member named 'rc_3'
ArduCopter28:1805: error: 'class Parameters' has no member named 'rc_3'
ArduCopter28:1805: error: 'class Parameters' has no member named 'rc_3'
ArduCopter28:1812: error: 'class Parameters' has no member named 'throttle_cruise'
ArduCopter28:1815: error: 'class Parameters' has no member named 'rc_3'
ArduCopter28:1815: error: 'class Parameters' has no member named 'throttle_min'
ArduCopter28:1816: error: 'class Parameters' has no member named 'rc_3'
ArduCopter28:1817: error: 'class Parameters' has no member named 'throttle_cruise'
ArduCopter28:1821: error: 'motors' was not declared in this scope
ArduCopter28:1822: error: 'class Parameters' has no member named 'rc_3'
ArduCopter28:1822: error: 'class Parameters' has no member named 'throttle_cruise'
ArduCopter28:1833: error: 'class Parameters' has no member named 'rc_3'
ArduCopter28:1839: error: 'class Parameters' has no member named 'rc_3'
ArduCopter28:1839: error: 'class Parameters' has no member named 'rc_3'
ArduCopter28:1840: error: 'class Parameters' has no member named 'rc_3'
ArduCopter28:1840: error: 'class Parameters' has no member named 'rc_3'
ArduCopter28:1843: error: 'class Parameters' has no member named 'rc_3'
ArduCopter28:1843: error: 'class Parameters' has no member named 'throttle_cruise'
ArduCopter28:1845: error: 'class Parameters' has no member named 'rc_3'
ArduCopter28:1845: error: 'class Parameters' has no member named 'rc_3'
ArduCopter28:1846: error: 'class Parameters' has no member named 'rc_3'
ArduCopter28:1846: error: 'class Parameters' has no member named 'rc_3'
ArduCopter28:1849: error: 'class Parameters' has no member named 'rc_3'
ArduCopter28:1849: error: 'class Parameters' has no member named 'throttle_cruise'
ArduCopter28:1862: error: 'class Parameters' has no member named 'rc_3'
ArduCopter28:1862: error: 'class Parameters' has no member named 'throttle_cruise'
ArduCopter28:1871: error: 'motors' was not declared in this scope
ArduCopter28:1878: error: 'class Parameters' has no member named 'pi_alt_hold'
ArduCopter28:1879: error: 'class Parameters' has no member named 'pi_alt_hold'
ArduCopter28:1889: error: 'class Parameters' has no member named 'sonar_enabled'
ArduCopter28:1896: error: 'class Parameters' has no member named 'throttle_cruise'
ArduCopter28:1899: error: 'class Parameters' has no member named 'rc_3'
ArduCopter28.ino: In function 'void update_navigation()':
ArduCopter28:1965: error: 'class Parameters' has no member named 'rc_2'
ArduCopter28:1965: error: 'class Parameters' has no member named 'rc_2'
ArduCopter28:1965: error: 'class Parameters' has no member named 'rc_2'
ArduCopter28:1965: error: 'class Parameters' has no member named 'rc_1'
ArduCopter28:1965: error: 'class Parameters' has no member named 'rc_1'
ArduCopter28:1965: error: 'class Parameters' has no member named 'rc_1'
ArduCopter28:1979: error: 'class Parameters' has no member named 'rc_2'
ArduCopter28:1979: error: 'class Parameters' has no member named 'rc_1'
ArduCopter28:1989: error: 'class Parameters' has no member named 'auto_land_timeout'
ArduCopter28:1992: error: 'class Parameters' has no member named 'rtl_approach_alt'
ArduCopter28:1999: error: 'class Parameters' has no member named 'rtl_approach_alt'
ArduCopter28:2000: error: 'class Parameters' has no member named 'rtl_approach_alt'
ArduCopter28:2011: error: 'class Parameters' has no member named 'sonar_enabled'
ArduCopter28:2037: error: 'class Parameters' has no member named 'super_simple'
ArduCopter28:2048: error: 'get_bearing_cd' was not declared in this scope
ArduCopter28.ino: In function 'void update_nav_RTL()':
ArduCopter28:2072: error: 'class Parameters' has no member named 'rtl_approach_alt'
ArduCopter28.ino: In function 'void read_AHRS()':
ArduCopter28:2088: error: 'ahrs' was not declared in this scope
ArduCopter28:2089: error: 'omega' was not declared in this scope
ArduCopter28:2089: error: 'imu' was not declared in this scope
ArduCopter28.ino: In function 'void update_trig()':
ArduCopter28:2097: error: 'Vector2f' was not declared in this scope
ArduCopter28:2097: error: expected `;' before 'yawvector'
ArduCopter28:2098: error: 'Matrix3f' was not declared in this scope
ArduCopter28:2098: error: expected `;' before 'temp'
ArduCopter28:2100: error: 'yawvector' was not declared in this scope
ArduCopter28:2100: error: 'temp' was not declared in this scope
ArduCopter28:2104: error: 'safe_sqrt' was not declared in this scope
ArduCopter28.ino: In function 'void update_altitude()':
ArduCopter28:2170: error: 'class Parameters' has no member named 'sonar_enabled'
ArduCopter28.ino: In function 'void update_altitude_est()':
ArduCopter28:2235: error: 'class Parameters' has no member named 'log_bitmask'
ArduCopter28:2235: error: 'motors' was not declared in this scope
ArduCopter28.ino: In function 'void tuning()':
ArduCopter28:2248: error: 'class Parameters' has no member named 'rc_6'
ArduCopter28:2249: error: 'class Parameters' has no member named 'rc_6'
ArduCopter28:2249: error: 'class Parameters' has no member named 'radio_tuning_low'
ArduCopter28:2249: error: 'class Parameters' has no member named 'radio_tuning_high'
ArduCopter28:2251: error: 'class Parameters' has no member named 'radio_tuning'
ArduCopter28:2254: error: 'class Parameters' has no member named 'pid_rate_roll'
ArduCopter28:2255: error: 'class Parameters' has no member named 'pid_rate_pitch'
ArduCopter28:2259: error: 'class Parameters' has no member named 'pi_stabilize_roll'
ArduCopter28:2260: error: 'class Parameters' has no member named 'pi_stabilize_pitch'
ArduCopter28:2264: error: 'class Parameters' has no member named 'pi_stabilize_roll'
ArduCopter28:2265: error: 'class Parameters' has no member named 'pi_stabilize_pitch'
ArduCopter28:2270: error: 'class Parameters' has no member named 'stabilize_d'
ArduCopter28:2274: error: 'class Parameters' has no member named 'acro_p'
ArduCopter28:2278: error: 'class Parameters' has no member named 'pid_rate_roll'
ArduCopter28:2279: error: 'class Parameters' has no member named 'pid_rate_pitch'
ArduCopter28:2283: error: 'class Parameters' has no member named 'pid_rate_roll'
ArduCopter28:2284: error: 'class Parameters' has no member named 'pid_rate_pitch'
ArduCopter28:2288: error: 'class Parameters' has no member named 'pi_stabilize_yaw'
ArduCopter28:2292: error: 'class Parameters' has no member named 'pi_stabilize_yaw'
ArduCopter28:2296: error: 'class Parameters' has no member named 'pid_rate_yaw'
ArduCopter28:2300: error: 'class Parameters' has no member named 'pid_rate_yaw'
ArduCopter28:2304: error: 'class Parameters' has no member named 'pid_throttle'
ArduCopter28:2308: error: 'motors' was not declared in this scope
ArduCopter28:2312: error: 'class Parameters' has no member named 'rc_6'
ArduCopter28:2312: error: 'relay' was not declared in this scope
ArduCopter28:2313: error: 'class Parameters' has no member named 'rc_6'
ArduCopter28:2313: error: 'relay' was not declared in this scope
ArduCopter28:2317: error: 'class Parameters' has no member named 'waypoint_speed_max'
ArduCopter28:2317: error: 'class Parameters' has no member named 'rc_6'
ArduCopter28:2321: error: 'class Parameters' has no member named 'pi_loiter_lat'
ArduCopter28:2322: error: 'class Parameters' has no member named 'pi_loiter_lon'
ArduCopter28:2326: error: 'class Parameters' has no member named 'pi_loiter_lat'
ArduCopter28:2327: error: 'class Parameters' has no member named 'pi_loiter_lon'
ArduCopter28:2331: error: 'class Parameters' has no member named 'pid_nav_lat'
ArduCopter28:2332: error: 'class Parameters' has no member named 'pid_nav_lon'
ArduCopter28:2336: error: 'class Parameters' has no member named 'pid_loiter_rate_lon'
ArduCopter28:2337: error: 'class Parameters' has no member named 'pid_loiter_rate_lat'
ArduCopter28:2341: error: 'class Parameters' has no member named 'pid_loiter_rate_lon'
ArduCopter28:2342: error: 'class Parameters' has no member named 'pid_loiter_rate_lat'
ArduCopter28:2346: error: 'class Parameters' has no member named 'pid_loiter_rate_lon'
ArduCopter28:2347: error: 'class Parameters' has no member named 'pid_loiter_rate_lat'
ArduCopter28:2351: error: 'class Parameters' has no member named 'pid_nav_lat'
ArduCopter28:2352: error: 'class Parameters' has no member named 'pid_nav_lon'
ArduCopter28:2362: error: 'class Parameters' has no member named 'pi_alt_hold'
ArduCopter28:2366: error: 'class Parameters' has no member named 'pid_optflow_roll'
ArduCopter28:2367: error: 'class Parameters' has no member named 'pid_optflow_pitch'
ArduCopter28:2371: error: 'class Parameters' has no member named 'pid_optflow_roll'
ArduCopter28:2372: error: 'class Parameters' has no member named 'pid_optflow_pitch'
ArduCopter28:2376: error: 'class Parameters' has no member named 'pid_optflow_roll'
ArduCopter28:2377: error: 'class Parameters' has no member named 'pid_optflow_pitch'
ArduCopter28:2382: error: 'ahrs' was not declared in this scope
ArduCopter28.ino: In function 'void update_nav_wp()':
ArduCopter28:2430: error: 'class Parameters' has no member named 'loiter_radius'
ArduCopter28:2431: error: 'class Parameters' has no member named 'loiter_radius'
ArduCopter28:2437: error: 'class Parameters' has no member named 'waypoint_speed_max'
ArduCopter28:2457: error: 'class Parameters' has no member named 'waypoint_speed_max'
ArduCopter28:2466: error: 'class Parameters' has no member named 'pid_loiter_rate_lon'
ArduCopter28:2467: error: 'class Parameters' has no member named 'pid_loiter_rate_lon'
ArduCopter28.ino: In function 'void update_auto_yaw()':
ArduCopter28:2477: error: 'get_bearing_cd' was not declared in this scope
ArduCopter28:2482: error: 'MAV_ROI_LOCATION' was not declared in this scope
ArduCopter28:2483: error: 'get_bearing_cd' was not declared in this scope
ArduCopter28:2485: error: 'MAV_ROI_WPNEXT' was not declared in this scope
Attitude.pde: In function 'void get_stabilize_roll(int32_t)':
Attitude:7: error: 'ahrs' was not declared in this scope
Attitude:22: error: 'class Parameters' has no member named 'pi_stabilize_roll'
Attitude:27: error: 'class Parameters' has no member named 'pi_stabilize_roll'
Attitude:29: error: 'class Parameters' has no member named 'pi_stabilize_roll'
Attitude.pde: In function 'void get_stabilize_pitch(int32_t)':
Attitude:41: error: 'ahrs' was not declared in this scope
Attitude:55: error: 'class Parameters' has no member named 'pi_stabilize_pitch'
Attitude:60: error: 'class Parameters' has no member named 'pi_stabilize_pitch'
Attitude:62: error: 'class Parameters' has no member named 'pi_stabilize_pitch'
Attitude.pde: In function 'void get_stabilize_yaw(int32_t)':
Attitude:78: error: 'ahrs' was not declared in this scope
Attitude:88: error: 'class Parameters' has no member named 'pi_stabilize_yaw'
Attitude:89: error: 'class Parameters' has no member named 'pi_stabilize_yaw'
Attitude.pde: In function 'void get_stabilize_rate_yaw(int32_t)':
Attitude:117: error: 'class Parameters' has no member named 'pi_stabilize_yaw'
Attitude.pde: In function 'void get_acro_roll(int32_t)':
Attitude:126: error: 'class Parameters' has no member named 'acro_p'
Attitude.pde: In function 'void get_acro_pitch(int32_t)':
Attitude:135: error: 'class Parameters' has no member named 'acro_p'
Attitude.pde: In function 'void get_acro_yaw(int32_t)':
Attitude:144: error: 'class Parameters' has no member named 'acro_p'
Attitude.pde: In function 'void get_roll_rate_stabilized_ef(int32_t)':
Attitude:157: error: 'class Parameters' has no member named 'acro_p'
Attitude:157: error: 'class Parameters' has no member named 'acro_balance_roll'
Attitude:166: error: 'ahrs' was not declared in this scope
Attitude:169: error: 'ahrs' was not declared in this scope
Attitude:173: error: 'motors' was not declared in this scope
Attitude:173: error: 'class Parameters' has no member named 'rc_3'
Attitude:178: error: 'ahrs' was not declared in this scope
Attitude:183: error: 'class Parameters' has no member named 'pi_stabilize_roll'
Attitude.pde: In function 'void get_pitch_rate_stabilized_ef(int32_t)':
Attitude:193: error: 'class Parameters' has no member named 'acro_p'
Attitude:193: error: 'class Parameters' has no member named 'acro_balance_pitch'
Attitude:202: error: 'ahrs' was not declared in this scope
Attitude:205: error: 'ahrs' was not declared in this scope
Attitude:209: error: 'motors' was not declared in this scope
Attitude:209: error: 'class Parameters' has no member named 'rc_3'
Attitude:214: error: 'ahrs' was not declared in this scope
Attitude:217: error: 'class Parameters' has no member named 'pi_stabilize_pitch'
Attitude.pde: In function 'void get_yaw_rate_stabilized_ef(int32_t)':
Attitude:228: error: 'class Parameters' has no member named 'acro_p'
Attitude:235: error: 'ahrs' was not declared in this scope
Attitude:240: error: 'motors' was not declared in this scope
Attitude:240: error: 'class Parameters' has no member named 'rc_3'
Attitude:248: error: 'class Parameters' has no member named 'pi_stabilize_yaw'
Attitude.pde: In function 'void run_rate_controllers()':
Attitude:304: error: 'class Parameters' has no member named 'rc_1'
Attitude:305: error: 'class Parameters' has no member named 'rc_2'
Attitude:306: error: 'class Parameters' has no member named 'rc_4'
Attitude.pde: In function 'int16_t get_rate_roll(int32_t)':
Attitude:322: error: 'omega' was not declared in this scope
Attitude:325: error: 'roll_rate_d_filter' was not declared in this scope
Attitude:332: error: 'class Parameters' has no member named 'pid_rate_roll'
Attitude:334: error: 'motors' was not declared in this scope
Attitude:334: error: 'AP_MOTOR_ROLLPITCH_LIMIT' was not declared in this scope
Attitude:335: error: 'class Parameters' has no member named 'pid_rate_roll'
Attitude:337: error: 'class Parameters' has no member named 'pid_rate_roll'
Attitude:339: error: 'class Parameters' has no member named 'pid_rate_roll'
Attitude.pde: In function 'int16_t get_rate_pitch(int32_t)':
Attitude:378: error: 'omega' was not declared in this scope
Attitude:381: error: 'pitch_rate_d_filter' was not declared in this scope
Attitude:388: error: 'class Parameters' has no member named 'pid_rate_pitch'
Attitude:390: error: 'motors' was not declared in this scope
Attitude:390: error: 'AP_MOTOR_ROLLPITCH_LIMIT' was not declared in this scope
Attitude:391: error: 'class Parameters' has no member named 'pid_rate_pitch'
Attitude:393: error: 'class Parameters' has no member named 'pid_rate_pitch'
Attitude:395: error: 'class Parameters' has no member named 'pid_rate_pitch'
Attitude.pde: In function 'int16_t get_rate_yaw(int32_t)':
Attitude:430: error: 'omega' was not declared in this scope
Attitude:433: error: 'class Parameters' has no member named 'pid_rate_yaw'
Attitude:435: error: 'motors' was not declared in this scope
Attitude:435: error: 'AP_MOTOR_YAW_LIMIT' was not declared in this scope
Attitude:436: error: 'class Parameters' has no member named 'pid_rate_yaw'
Attitude:438: error: 'class Parameters' has no member named 'pid_rate_yaw'
Attitude:440: error: 'class Parameters' has no member named 'pid_rate_yaw'
Attitude:462: error: 'class Parameters' has no member named 'rc_4'
Attitude:462: error: 'class Parameters' has no member named 'rc_4'
Attitude:462: error: 'class Parameters' has no member named 'rc_4'
Attitude.pde: In function 'int16_t get_throttle_rate(int16_t)':
Attitude:483: error: 'class Parameters' has no member named 'throttle_cruise'
Attitude:490: error: 'class Parameters' has no member named 'pid_throttle'
Attitude:492: error: 'motors' was not declared in this scope
Attitude:492: error: 'AP_MOTOR_THROTTLE_LIMIT' was not declared in this scope
Attitude:493: error: 'class Parameters' has no member named 'pid_throttle'
Attitude:495: error: 'class Parameters' has no member named 'pid_throttle'
Attitude:497: error: 'class Parameters' has no member named 'pid_throttle'
Attitude.pde: In function 'void reset_I_all()':
Attitude:555: error: 'class Parameters' has no member named 'pi_stabilize_yaw'
Attitude.pde: In function 'void reset_rate_I()':
Attitude:560: error: 'class Parameters' has no member named 'pid_rate_roll'
Attitude:561: error: 'class Parameters' has no member named 'pid_rate_pitch'
Attitude:562: error: 'class Parameters' has no member named 'pid_rate_yaw'
Attitude.pde: In function 'void reset_optflow_I()':
Attitude:567: error: 'class Parameters' has no member named 'pid_optflow_roll'
Attitude:568: error: 'class Parameters' has no member named 'pid_optflow_pitch'
Attitude.pde: In function 'void reset_wind_I()':
Attitude:578: error: 'class Parameters' has no member named 'pi_loiter_lat'
Attitude:579: error: 'class Parameters' has no member named 'pi_loiter_lon'
Attitude:581: error: 'class Parameters' has no member named 'pid_loiter_rate_lat'
Attitude:582: error: 'class Parameters' has no member named 'pid_loiter_rate_lon'
Attitude:584: error: 'class Parameters' has no member named 'pid_nav_lat'
Attitude:585: error: 'class Parameters' has no member named 'pid_nav_lon'
Attitude.pde: In function 'void reset_throttle_I()':
Attitude:591: error: 'class Parameters' has no member named 'pi_alt_hold'
Attitude:592: error: 'class Parameters' has no member named 'pid_throttle'
Attitude.pde: In function 'void reset_stability_I()':
Attitude:599: error: 'class Parameters' has no member named 'pi_stabilize_roll'
Attitude:600: error: 'class Parameters' has no member named 'pi_stabilize_pitch'
GCS_Mavlink.pde: At global scope:
GCS_Mavlink:9: error: 'mavlink_statustext_t' does not name a type
GCS_Mavlink:19: error: expected ',' or '...' before '*' token
GCS_Mavlink:19: error: ISO C++ forbids declaration of 'prog_char_t' with no type
GCS_Mavlink:31: error: variable or field 'send_heartbeat' declared void
GCS_Mavlink:31: error: 'mavlink_channel_t' was not declared in this scope
Log In to reply